python 自動識別并連接串口的實現
這個屬于我項目中一個函數,跟大家分享一下我的思路及最終實現
在編寫串口通信工具中,需要實現一個函數,自動找到對應com 口,并且連接該com口,保證后續通信正常作為初始化過程的一部分。
思路
在win 設備管理器中,經常會出現多個com 口,但并不是每個com 口都是目標設備所鏈接的。嘗試打開每個com 口,輸入enter 按鍵, 正確的com 口,會有ack log 返回,表明通信 正常
否則,沒有任何log 返回,則判斷為非目標設備所連接的com 口。
實現
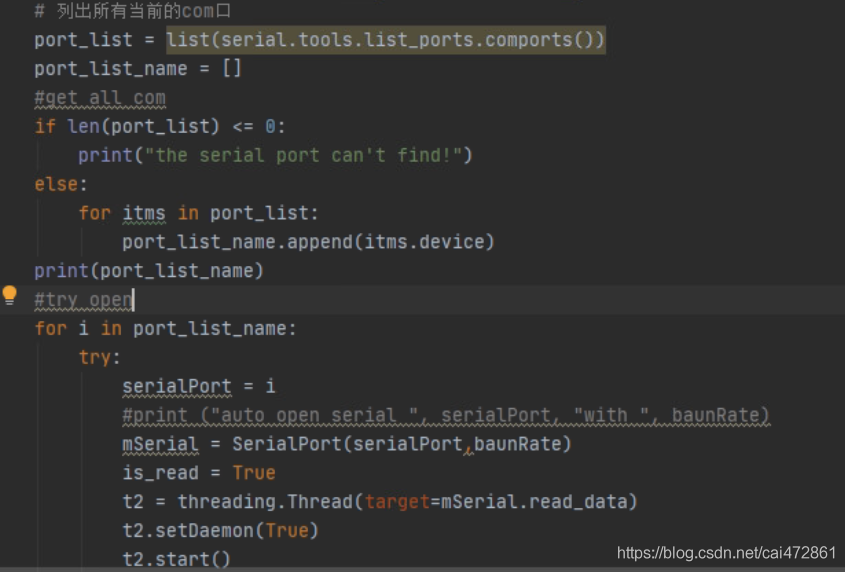
嘗試去打開所有com 口,然后發送enter, 如果在一段時間內有返回值,檢查com 口收到的字節數,如果非零,則表明找到了對應的com 口。
完整測試代碼如下:
import serialimport serial.tools.list_portsimport threadingimport binasciiimport timefrom datetime import datetime# default valuebaunRate = 115200is_read = Falseis_write = Falsewrite_buff = []sys_buff = []mSerial = Nonecallback = Noneis_opened = 0is_registed = 0class SerialPort: def __init__(self,port,buand): self.port = serial.Serial(port,buand) self.port.close() if not self.port.isOpen(): self.port.open() #the index of data_bytes for read operation,私有屬性 #only used in read lines self.__read_ptr = 0 self.__read_head = 0 #store all read bytes # used in read date, read lines self.__data_bytes = bytearray() def port_open(self): if not self.port.isOpen(): self.port.open() def port_close(self): self.port.close() def send(self): global is_write global write_buff while is_write: if len(write_buff):msg = write_buff.pop(0)msg = msg+'n'cmd = msg.encode()try: self.port.write(cmd)except: write_buff.clear() is_write = False write_buff.clear() def read_data(self): global is_read global is_opened byte_cnt = 0 while is_read: try:count = self.port.inWaiting()if count > 0: rec_str = self.port.read(count) self.__data_bytes = self.__data_bytes+rec_str#print('receive:',rec_str.decode()) #print(rec_str) byte_cnt += count if not is_opened: is_opened = 1 #print('累計收到:',byte_cnt) #time.sleep(0.5)self.read_lines() except:deinit() #將當前所有的數據都讀出,讀取位置不變,每次讀取指針依次移動,不漏數據, 讀取行為一直在進行 def read_lines(self): #reset line_cnt = 0 data_len = len(self.__data_bytes) #print ('') #print ('begin: prt=:', self.__read_ptr, ' head =', self.__read_head,'current len =',data_len) if self.__read_ptr >=data_len: return #get all lines in current data_bytes while(self.__read_ptr < data_len-1): if(self.__data_bytes[self.__read_ptr+1] == 0x0a and self.__data_bytes[self.__read_ptr] == 0x0d):tmp = bytearray()tmp = self.__data_bytes[self.__read_head:self.__read_ptr]try: line = tmp.decode()except: self.__read_head = self.__read_ptr + 2 self.__read_ptr = self.__read_head continueiprint(line)line_cnt += 1self.__read_head = self.__read_ptr + 2self.__read_ptr = self.__read_head else:self.__read_ptr = self.__read_ptr + 1def auto_open_serial(): global baunRate global mSerial global callback global is_registed global is_opened #reset deinit() # 列出所有當前的com口 port_list = list(serial.tools.list_ports.comports()) port_list_name = [] #get all com if len(port_list) <= 0: iprint('the serial port can’t find!') return False else: for itms in port_list: port_list_name.append(itms.device) #try open #print(port_list_name) for i in port_list_name: try: mSerial = SerialPort(i,baunRate) iprint('try open %s'%i) start_task() send('') #return True time.sleep(1) if is_opened:iprint('connect %s successfully'%i)return True else:deinit()if i == port_list_name[len(port_list_name)-1]: iprint('uart don’t open') breakcontinue except: iprint(' uart don’t open') deinit() return Falsedef deinit(): global mSerial global is_write global is_read global write_buff global is_opened if mSerial: mSerial.port_close() is_opened = 0 is_read = False is_write = False write_buff = [] mSerial = None time.sleep(1)def init(): global mSerial global callback global is_registed global is_opened global is_read global is_write #retry retry_time = 0 while not auto_open_serial(): if not is_opened: iprint('wait for uart connect, retry %s'%str(retry_time)) else: return True retry_time += 1 time.sleep(2) if retry_time == 10: iprint(' open uart fail') return Falsedef send(msg): global mSerial global is_write global write_buff if is_write: write_buff.append(msg)def start_task(): global mSerial global is_write global is_read if mSerial: is_write = True t1 = threading.Thread (target=mSerial.send) t1.setDaemon (False) t1.start () is_read = True t2 = threading.Thread (target=mSerial.read_data) t2.setDaemon (False) t2.start ()def iprint(msg): global callback global is_registed msg = '[Uart] '+str(msg) if is_registed: callback.append(msg) else: print(msg)def start_sys_cmd(): global is_registed if is_registed: t3 = threading.Thread (target=process_receive_sys_cmd) t3.setDaemon (False) t3.start()def process_receive_sys_cmd(): global sys_buff global is_registed global callback #print('process_receive_sys_cmd') while is_registed: #print ('wait,process_receive_sys_cmd') if len(sys_buff): #print ('receive,process_receive_sys_cmd') line = sys_buff.pop(0) if 'init' in line:if is_opened and is_read and is_write: iprint('already open uart') breakiprint('start init')init() if is_opened: break iprint('Eixt uart sys thread')def register_cback(list): global callback global is_registed callback = list is_registed = 1def unregister_cback(): global callback callback.clear()if __name__ == ’__main__’: receive = [] register_cback(receive) sys_buff.append('init') start_sys_cmd() def process_receive_msg(): global receive while True: #print('wait') if len(receive):#print('receive')print(receive.pop(0)) t = threading.Thread(target=process_receive_msg) t.setDaemon(False) t.start()
到此這篇關于python 自動識別并連接串口的實現的文章就介紹到這了,更多相關python 自動識別并連接串口內容請搜索好吧啦網以前的文章或繼續瀏覽下面的相關文章希望大家以后多多支持好吧啦網!
相關文章:
 網公網安備
網公網安備